The depth of the notch used to control a feedback frequency should not be greater than the relatively hot area of gain that caused it, plus a little safety margin.
This means notches on the order of a couple of dB, not tens of dB. If the auto-notching algorithm is placing notches with a depth of 20 dB or more, something is wrong. One area to look at is the bandwidth of the notches used.
There is a tendency with these algorithms to try and use notches that are as narrow as possible, with the mistaken belief that the cumulative response will be less noticeable. What usually ends up happening is that several narrow notches get placed at a depth of 20 dB or more to lower the overall gain 2 or 3 dB in a larger area.
Furthermore, high Q (narrow) notches are less effective at controlling feedback during environmental changes (such as temperature mentioned above) than are low Q (wide), shallow notches. This means if you use low Q, shallow notches you will be less likely to have notches deployed that are not performing any function other then hacking up the hard work you put in on your frequency response.
Most auto-notching algorithms allow you to select the default width and maximum depth of the notches used.
How much additional gain before feedback can be achieved from auto-notching? If you had a perfectly flat frequency response then the auto-notching algorithm would not provide any additional gain margin.
The best the algorithm can do is pull down the gain in a finite number of locations. If you had a handful of peaks then the auto-notch could provide additional margin based on how much higher the peaks are above the remaining response. Typically the auto-notch provides only a couple of dB of additional gain before feedback.
Despite the lack of large additional gain margin there are still two other significant reasons for having an auto-notch in the system. First, the auto-notch provides a simple tool to aid in the identification of problem spots in the response when the audio system is first installed. Second, it provides a safety net that can remain in place to cope with the ever-changing acoustic path (unwanted additional reflections, gain change etc.).
Conclusions
Acoustic feedback is both a magnitude and phase issue. As such, changes in the system’s phase response due to delay, filtering or temperature changes impact potential feedback frequencies.
If notch filters are used to control feedback they should be placed after all other changes are made to the system’s phase response to ensure their utility. They should also be wide enough to ensure their ongoing usefulness despite changes to the feedback path.
In order to bring a runaway frequency back into stability the magnitude simply needs to be taken below the unity gain mark plus a couple of dB for a safety margin. In addition to a slightly expanded gain margin, the auto-notch tool provides a simple means for ringing out a room as well as leaving a safety net after the original installation is complete.
In addition to auto-notching algorithms, adaptive filter models and frequency shifting algorithms also provide useful ways to suppress feedback and increase a system’s gain before feedback margin.
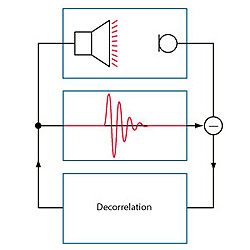
An adaptive filter model based feedback suppressor relies on an accurate model of the loudspeaker to microphone acoustic path in order to remove feedback from a receiving microphone. If the model is inaccurate then distortion can occur.
A decorrelation process is used to improve the convergence characteristics of the broad band adaptive filter. This decorrelation can also add a limited amount of distortion. However, the adaptive filter model is capable of greater than 10 dB of additional gain before feedback.
The utility of the frequency shifter depends on the system where it is applied. As a general rule the frequency shifter will provide a greater gain margin in a more reverberant space than in a smaller less reverberant space. The frequency shift should be kept to less than 12 Hz to minimize audible distortion.
Acoustic feedback has been roaming around sound systems for some time. The tools just outlined provide a set of unique solutions each with its own compromises. Getting the most out of the tool requires understanding the problem and the proposed solution. With the proper tools in place, perhaps our memories of the howl and screech that characterize the Larsen effect will begin to slowly fade away.
References
1. Eberhard Hansler and Gerhard Schmidt, Acoustic Echo and Noise Control (John Wiley & Sons Inc, Hoboken, New Jersey, 2004). pp. 144-146
2. Roland-Borg Corporation, 1978. Comprehensive Feedback Elimination System Employing Notch Filter, United States Patent #4,088,835.
A PDF of this article is available for download on the Rane website.
Presented with permission from Rane Corporation.