

When considering a loudspeaker for a certain application, the shape of its coverage is a paramount concern. The width and depth of the intended listening area, along with possible loudspeaker positions, can immediately disqualify some loudspeakers while making compelling options of others.
In most cases, system designers are stuck with the horizontal pattern of whatever product they select. To increase the overall coverage width, we must resort to additional subsystems like outfills. In the vertical plane, line array systems offer a powerful tool, allowing us to tailor the resulting coverage pattern to the depth of the listening area.
Let’s break line array systems into two classes: mechanically articulated arrays and electronically steered arrays. The first is what most of us consider to be conventional line array. To this day, it remains in a form similar to its first popular incarnation, L-Acoustics V-DOSC.
We manipulate the vertical coverage pattern by changing inter-element angles, in an effort to maintain similar tonality and SPL from the front to the back of the room. Our goal is the same with electronically steered arrays, but the way we control them is a little more complicated.
What’s Old Is New Again
Here’s a crash course in the basic operating principle and limitations of electronic beam steering technology. Although the commercial success of line arrays is a recent phenomenon, the operating principle behind them is a well-established idea in the relatively short timeline of loudspeaker development.
The idea that we can control the dispersion of sound using a line of transducers dates to Harry Olson’s Acoustical Engineering in 1940, and implementation of basic column arrays followed hardly a decade after. Though primitive, column arrays are an effective means of creating narrow vertical coverage, resulting in less reflected energy from the floor and ceiling and increased intelligibility for listeners.
The behavior of a line source varies with frequency, and it is dependent on the length of the line. At frequencies whose wavelength exceeds twice the line length, there is little pattern control, and the array behaves much like a single point source of equivalent power.
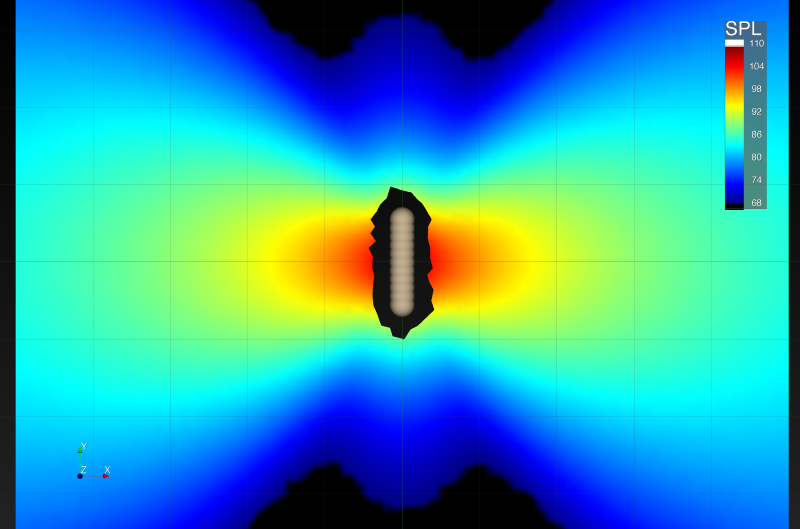
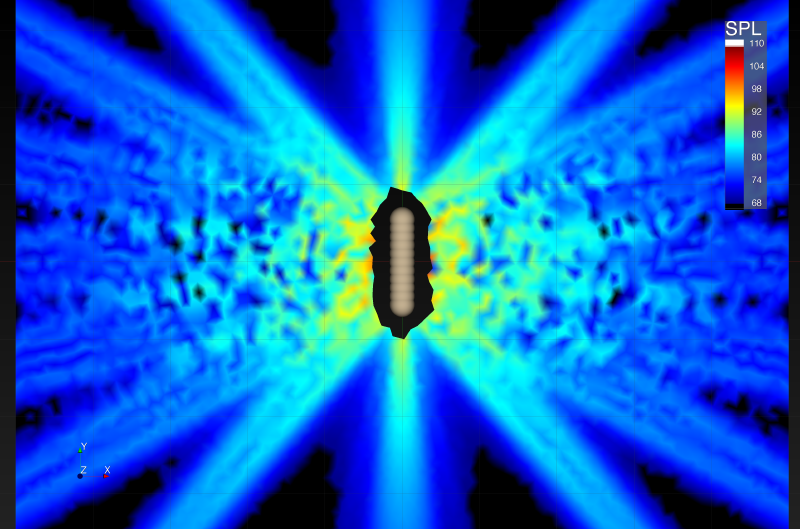
Higher in frequency, where wavelengths are equal to or shorter than line length, the coverage becomes narrowed, an effect sometimes referred to as “control.” Figure 1 shows such a case, an 11-foot-long line of omnidirectional sources at 100 Hz. (All figures are via the Meyer Sound MAPP 3D system design tool.)
Note that at 11 feet, the line length and wavelength are equal.
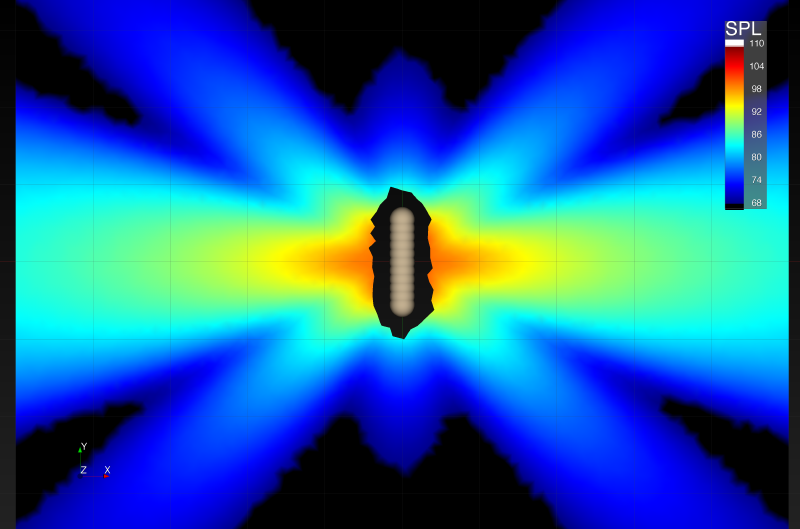
Now let’s view a prediction at 200 Hz in Figure 2. We can see that our wavelength is halved, with a twice-as-narrow coverage angle and increased side lobing as a result.
Thankfully, we have potential workarounds. Figure 3 again depicts 200 Hz, but with only the innermost half of the transducers on. Alternatively, Figure 4 shows all transducers participating fully, but with a simple delay arc applied.
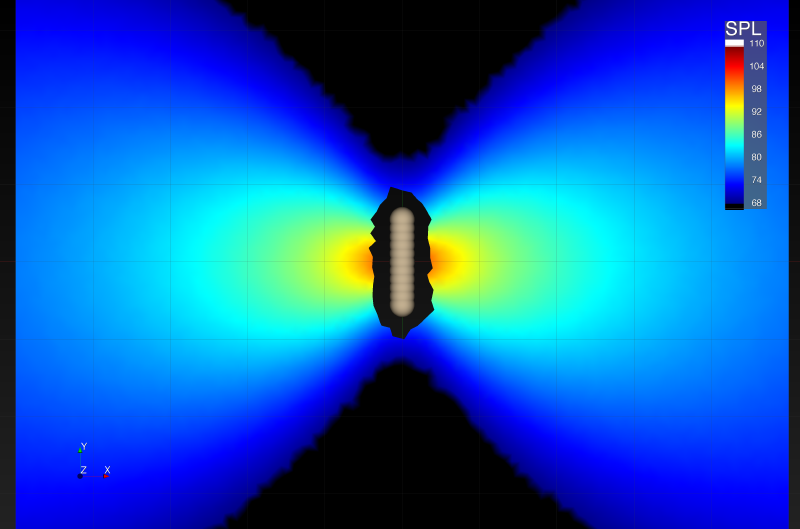
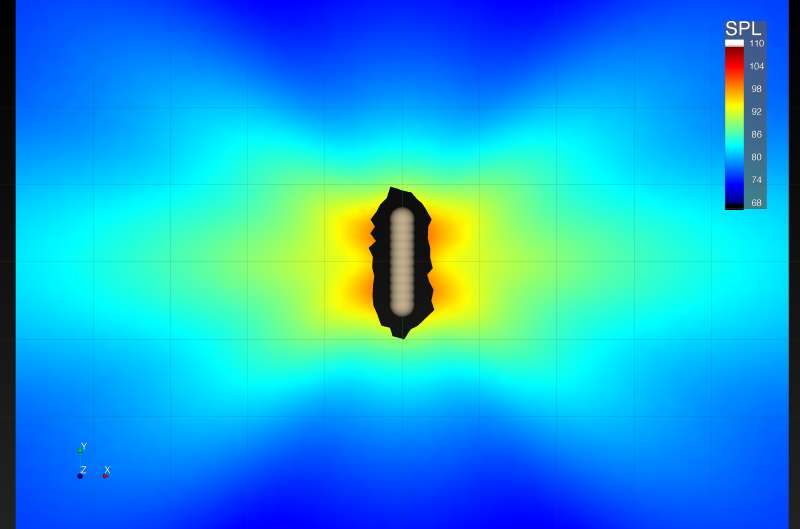
In both cases, we’ve made the dispersion of 200 Hz more similar to 100 Hz, which is an important step in maintaining the same tonality throughout our listening area. By changing either level or time, we can change the resulting coverage of the array.
This is, in principle, how electronic beam steering works, although the problem becomes more complicated when more than two frequencies are considered. Where our line is long enough to maintain pattern control, we might need a different level and a different arrival time (gain and delay) for every transducer at every frequency.
Purely delaying or attenuating certain transducers will not accomplish this; instead, a combination of all-pass and FIR filters alongside conventional gains, delays, and equalization can achieve the desired result. Thankfully, the end user is not tasked with any of the heavy mathematical lifting – it’s all done in manufacturer-provided prediction software.
Some Caveats
There are a few limitations worth noting. So far, we have only discussed the minimum frequency at which we have control, but some factors do affect the maximum. First is the spacing between transducers. If they are no more than 1/2 a wavelength apart, the array can maintain good control.
However, as wavelengths decrease further, the array continues to exhibit more lobing until the combing and rippling becomes problematic. Figure 5 offers a prediction at 4 kHz, where the inter-driver spacing is several times the wavelength. There is one mitigating factor – the polar pattern of a real transducer narrows with increased frequency, so the very top of the array doesn’t contribute these high frequencies to a listener sitting close to the bottom.
That same phenomenon is responsible for limiting the angle at which steering is possible; we are unable to effectively steer beyond the coverage angle of the individual transducers.
To close, let’s discuss some places where electronic steering can be found in the wild. For many of us, the most relatable will be the widening of subwoofer array coverage at concerts. Meyer Sound’s Low-Mid Beam Control algorithm is another example; it uses a series of all-pass filters to better match the low-frequency coverage of a line array to the high frequencies.
In historic buildings, churches, and other places where aesthetic considerations prohibit the use of conventional line arrays, electronically steered column arrays such as Renkus-Heinz ICLive X present a flexible, less obtrusive approach. Some larger line array systems without mechanical articulation exist, relying exclusively on electronic steering for pattern control.
There are also some emerging products such that make use of the ability to steer in both the horizontal and vertical directions. As processing power comes down in price, we should expect electronic steering to become both more common and more capable.











